本ページはプロモーションが含まれています。
「ロボット掃除機は、何度も壁に当たりながら時間をかけて地図を作るもの」という認識は、ルンバ miniによって過去のものとなりました。新しく迎えたルンバ miniを部屋に置いた瞬間、その進化の速度に驚かされることでしょう。
筆者が実際に使用して最も特筆すべきと感じたのは、部屋の中央でくるりと一回転しただけで、6畳間の構造をほぼ完璧に把握してしまう圧倒的なマッピング精度です。かつてのモデル(105や205)が苦戦した箇所も見事に攻略した挙動を見せます。
この記事では、実際にイタズラに近い検証を行って判明した「ルンバ miniの知能」と、それを支える技術的根拠を解説します。これを読めば、なぜ今ルンバ miniが「最も失敗しない選択」と言えるのか、その理由が明確になるはずです。
▶ 最も失敗しない選択 [マッピングの常識を覆す「ルンバ mini」の最新価格をチェックする驚異のスキャン速度:一瞥で「隠れた場所」まで見通す精度
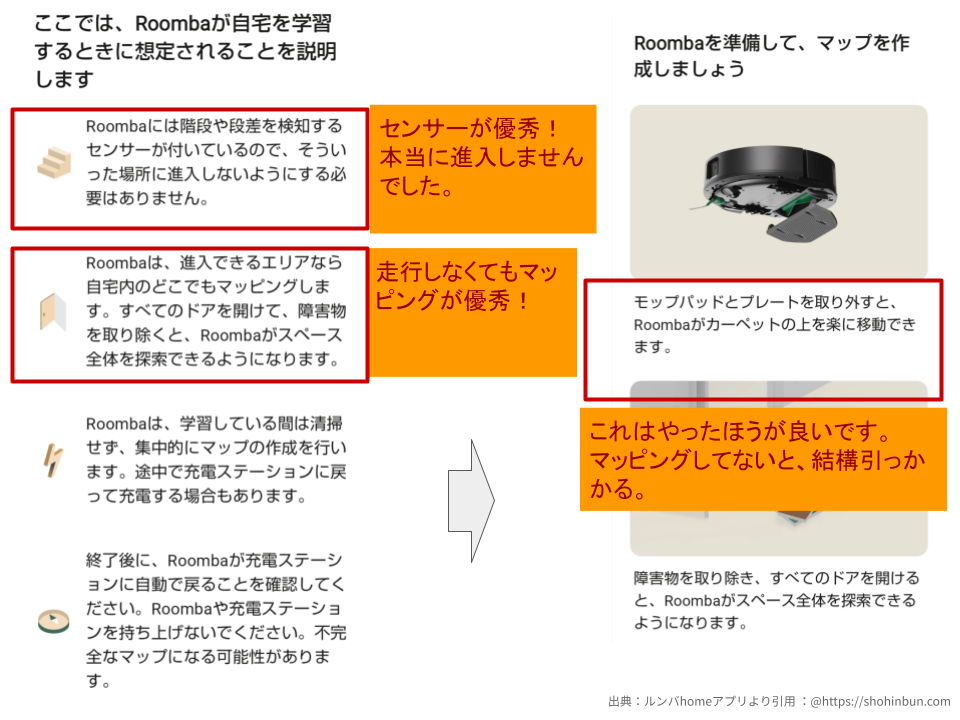
6畳間なら「一回転」でマッピングが完了する
ルンバ miniのマッピング能力は、物理的に走行する前に視覚的・センサー的に空間を捉える能力が格段に向上しています。
センサー解像度と処理アルゴリズムの統合
従来のロボット掃除機は「接触」と「移動」の繰り返しで地図を補完していましたが、ルンバ miniは高度な光学センサーと高度な自己位置推定(SLAM)を組み合わせることで、静止状態に近い状態から周囲の幾何学的構造を算出します。
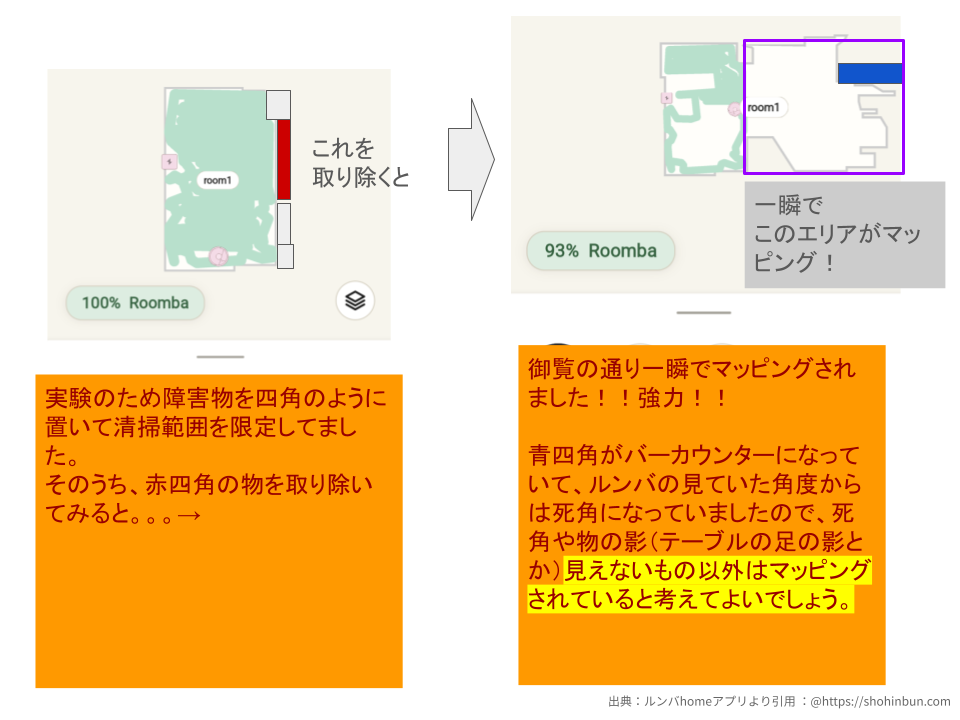
隠れたスペースの認識
驚くべきことに、部屋を区切って隠していたエリアも、ルンバ miniがその付近を通過した際の一瞥だけで、アプリ上のマップに正確に反映されました。わざわざその地点まで踏み込まなくても「あそこに空間がある」と認識している事実は、これまでのマッピングとは異次元です。
掃除開始前の「状況把握」が早いため、無駄な往復が極限まで排除されている
この速さが、結果として清掃時間の短縮と、バッテリーの効率的な運用など諸々の機能にに直結しています。

「壁にガツガツ当たっていた時代は終わりました。この「一瞥で部屋を理解する」快感は、一度味わうと戻れません。
▶ [マッピングの常識を覆す「ルンバ mini」の最新価格をチェックする論理的な「知能」:ステーション不在を見抜く記憶力
ルンバ miniは、自分が今どこにいるのか、そして本来あるべき「ホーム(ステーション)」がどこにあるのかを、過去のデータと照合して判断しています。
空間データとステータス記憶の保持
知らない部屋にルンバ miniを置き去りにし、「ホームボタン」を押すテストを行いました。
- 一回目: くるりと一回転し、周囲をスキャン。「ステーションが見つかりません(「何か意地悪しましたよね!」)」と、論理的に現状を把握。
- 二回目(再試行): 周囲を念入りにチェックした上で、再度「ステーションが見つかりません(「ほらやっぱり意地悪ですよね!」)」と回答。
マッピングの不整合を自ら指摘する
この挙動から、ルンバ miniは単に「今見えない」だけでなく、「ここには以前のマップにあったはずのステーションが存在しない」という不整合を記憶に基づいて指摘していることが分かります。「証拠は挙がっている」と言わんばかりの正確なエラー報告は、そのマッピングデータの堅牢さを示しています。
環境の変化に強く、自己診断能力が高い
ユーザーが誤った場所に置いたとしても、ルンバは混乱することなく、現状を正確にアプリや音声で伝えてくれる安心感があります。
意地悪なテストすら冷静に捌くこの知能。ルンバ miniなら「迷子になって力尽きている」情けない姿を見ることもなくなりますね。
▶ [迷子にならない賢い相棒。ルンバ miniを詳しく見る]盲点だったのか、ヘッド? すのことか椅子の梁とかに注意。
悔しかったのでセンサーのアラを探していました。盲点はこの盛り上がった部分(以降ヘッド)です。
下のパーツは入れるので入っていきますが、このヘッドだけがぶつかるという現象がマッピング中起こっていました。
すのことか、椅子の足の梁とか、下に空間のあるものは注意が必要です。
3回ぐらいぶつけるとあきらめるので問題はありませんが、甘いなとは思いました。
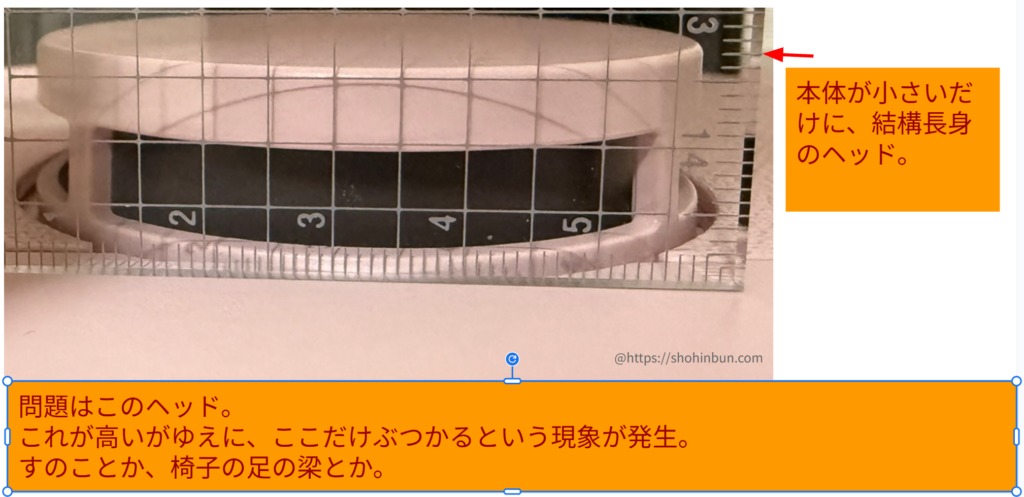
私の個人的な盲点としては、サイズが思ったより小さく、入れる所が多くなったので、今まで進入禁止にしなくてもよかったスペースもいったん見直しました。
優秀ゆえのへ問題点と言ったところでしょうか。
まとめ
センサーのレビューのようになってきましたが、つまりは、このくらいの範囲を見通しながら常に掃除ができるということです。
部屋の隅やコントロール、障害物の回避がうまくできてるのはこのおかげですね。納得です。
この特性はルンバ miniだけでなく、他のLIDAR搭載機にも言えると思います。
自動車にも搭載してる部品なので精度も信頼性もいいですね。LIDAR自体も昔よりも格段によくなってます。
安価な105や205で妥協して「マッピングのやり直し」に時間を奪われるより、最初からminiを選んで自由な時間を手に入れませんか?
優秀すぎるがゆえの「隙間への潜り込み」さえ対策すれば、これほど頼もしい選択肢はありません。